I futuri sistemi di guida automatica devono essere progettati per essere sicuri e resilienti a potenziali attacchi cibernetici in maniera da gestire qualsiasi situazione nel dominio operativo. Le sfide da superare sono le capacità di percezione dell’ambiente da parte dei sensori del veicolo per agire in sicurezza e per interagire con gli altri utenti della strada con una supervisione limitata del conducente e in prospettiva in modalità senza conducente.
La localizzazione dei veicoli in tempo reale con elevata precisione, integrità e continuità è una risorsa cruciale per le auto a guida autonoma che devono poter garantire almeno lo stesso livello di sicurezza che si otterrebbe se l’auto fosse guidata da una persona.
Piattaforme ibride con sensori Video-GNSS-IMU consentono di complementare le prestazioni raggiunte dai soli sensori video, in particolare per le funzioni di rilevamento dei segnali stradali, il mantenimento della corsia, la gestione dei limiti di velocità. Queste funzioni richiedono una combinazione a prova di errore dei dati GNSS e IMU, insieme alle immagini catturate da sensori visivi per valutarne le capacità in tutti gli scenari operativi e ambientali in cui il veicolo dovrebbe viaggiare. A questo proposito, le case automobilistiche ed i fornitori tier-1 stanno testando sensori di percezione con i veicoli che viaggiano lungo strade specifiche. Poiché le piattaforme multi-sensore sono realizzate con tecnologie diverse e ogni sensore deve essere caratterizzato nello scenario operativo, un processo standard per acquisire i dati di posizionamento rispetto a un riferimento certo è un prerequisito per la valutazione della sicurezza. Dovendo inoltre gestire set di dati di grandi dimensioni, l’intera catena di acquisizione ed elaborazione non dovrebbe essere supervisionata, soprattutto per supportare una fase di validazione e certificazione standard.
Queste sfide verranno affrontate nel progetto STEV – Satellite Test bed for EGNSS based Vehicle Localization Validation – finanziato da ASI-ESA e coordinato da Radiolabs, con INTECS come partner. L’obiettivo è quello di creare un’infrastruttura indipendente per la raccolta e la riproduzione dei dati registrati sul campo tramite GNSS, tecnologie inerziali e visive, su scenari operativi rappresentativi delle applicazioni veicolari inclusi i motocicli. ANAS – società per azioni innovativa, che gestisce 32.000 Km di strade, e opera a livello nazionale e internazionale con Ferrovie dello Stato Italiane come socio unico – contribuirà al progetto in relazione all’iniziativa Smart Road.
Anche Honda Italia darà un contributo al progetto per la sua attenzione alle future tecnologie di guida assistita, fondamentali per migliorare la sicurezza delle motociclette. Inoltre, i dati raccolti ed elaborati su strada saranno utili per valutare le prestazioni delle piattaforme multi-sensore anche per le nuove applicazioni in ambito ferroviario per il posizionamento in sicurezza dei treni vista la somiglianza dell’ambiente stradale con quello ferroviario e dei requisiti, riducendo così il ricorso a campagne di test ad-hoc lungo le linee ferroviarie.
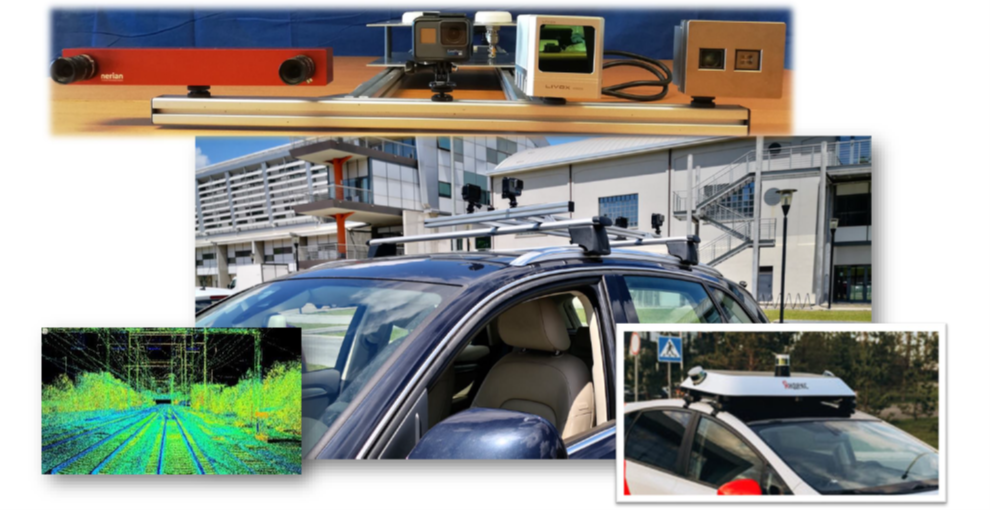
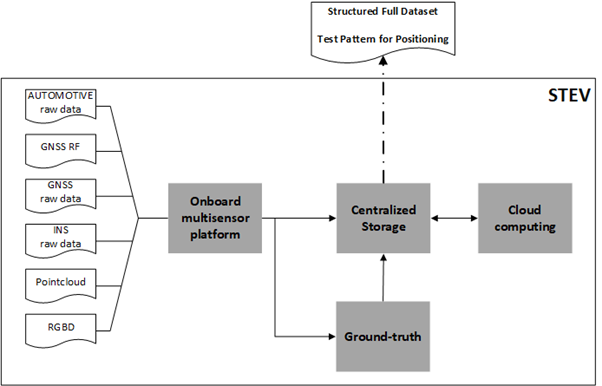
L’architettura di STEV è costituita da un’unità di bordo (OBU) multi-sensore, un registratore, un veicolo dedicato e una struttura di elaborazione centralizzata. Verrà inoltre sviluppata e convalidata un’unità del segmento ground truth come riferimento indipendente e affidabile rispetto al quale misurare le prestazioni di ciascun sensore nel dominio della posizione.
L’unità di bordo sarà installata anche su un veicolo di ANAS per l’iniziativa Smart Road e su una moto di HONDA Italia. L’intero sistema è progettato secondo procedure standard per raccogliere un set affidabile e riproducibile di dati provenienti dai sensori GNSS, IMU, Optical Camera, LIDAR e dal CAN bus installati su diversi veicoli, durante la percorrenza di strade rappresentative degli ambienti operativi. I dati iniziali per la messa in servizio del sistema STEV saranno raccolti su circa 10.000 Km di test sul campo con veicoli che percorrono strade urbane, montane e suburbane. ANAS contribuirà alla definizione dei casi d’uso e alla campagna di test sulle tratte Smart Road selezionate, attraverso veicoli equipaggiati con l’unità di bordo multi-sensore. Honda Italia contribuirà alla definizione dei requisiti degli utenti per gli scenari operativi della moto e alla fase sperimentale con una moto dotata di unità di bordo multi-sensore.
Il sistema di test è progettato per l’acquisizione continua dei dati fino a 8h @1.5Gb/s con memoria locale di 6TB. I dati registrati saranno elaborati per la produzione dei cosiddetti reference pattern a fronte dei quali valutare il reale comportamento del veicolo negli scenari operativi e per supportare il processo di validazione e certificazione.
 L’infrastruttura realizzata dal progetto STEV integrerà il Laboratorio di Validazione e Certificazione P-CAR in fase di sviluppo nella città dell’Aquila, per la costruzione di un Centro Accreditato One Stop Shopping in Europa dove valutare le prestazioni delle tecnologie di localizzazione, comunicazione e sicurezza informatica per i veicoli connessi e autonomi per poter operare in sicurezza sulle strade pubbliche secondo gli standard di sicurezza stabiliti.
L’infrastruttura realizzata dal progetto STEV integrerà il Laboratorio di Validazione e Certificazione P-CAR in fase di sviluppo nella città dell’Aquila, per la costruzione di un Centro Accreditato One Stop Shopping in Europa dove valutare le prestazioni delle tecnologie di localizzazione, comunicazione e sicurezza informatica per i veicoli connessi e autonomi per poter operare in sicurezza sulle strade pubbliche secondo gli standard di sicurezza stabiliti.
Radiolabs è membro del Cluster Nazionale Trasporti (LINK), Polo Innovazione Automotive Abruzzo (LINK) e del Dominio ICT Aerospazio Abruzzo (LINK)


