Sviluppo tecnologie allo stato dell’arte e della piattaforma di verifica per una nuova generazione del sistema multi-sensore di localizzazione del treno basato su GNSS-IMU e sensori video
 Grazie ai risultati positivi del progetto VOLIERA fase 1 – Video Odometry with Lidar ed EGNSS for ERTMS Applications – l’ESA ha assegnato a Hitachi Rail STS in collaborazione con Radiolabs una seconda fase del progetto per realizzare sia il prototipo pronto per i test in ambiente ferroviario che la piattaforma di simulazione per verificarne le prestazioni in ambiente virtuale.
Grazie ai risultati positivi del progetto VOLIERA fase 1 – Video Odometry with Lidar ed EGNSS for ERTMS Applications – l’ESA ha assegnato a Hitachi Rail STS in collaborazione con Radiolabs una seconda fase del progetto per realizzare sia il prototipo pronto per i test in ambiente ferroviario che la piattaforma di simulazione per verificarne le prestazioni in ambiente virtuale.
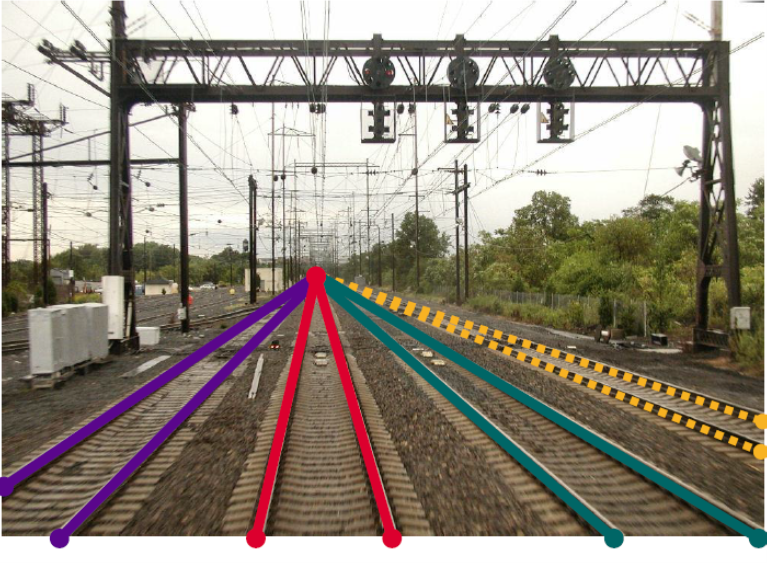
VOLIERA rappresenta un’innovazione radicale per il sistema di controllo dei treni basato sullo standard ERTMS in quanto migliora l’accuratezza della localizzazione del treno oltre lo stato dell’arte. Il cuore di VOLIERA è un’architettura multi-sensore in grado di processare i segnali rilevati da sensori video con quelli del GNSS e IMU. Questa soluzione sfrutta da un lato le più recenti tecnologie di sensori messe a punto per il settore automobilistico unitamente a quelle basate sul GNSS ed IMU, per sviluppare nuovi algoritmi in grado di elaborare i dati. L’obiettivo è determinare la posizione assoluta del treno, l’individuazione del binario sul quale si trova il treno e un sistema di video-odometria ad elevata precisione e integrità in grado di funzionare ovunque e in qualsiasi momento, inclusi tunnel, canyon urbani e stazioni. Inoltre, grazie ai sensori video sarà possibile monitorare la linea ferroviaria in tempo reale oltre ciò che è visibile con gli occhi del macchinista e di rilevare punti di riferimento lungo linea.
Le tecnologie realizzate con VOLIERA consentiranno la realizzazione di prodotti innovativi stand-alone per la localizzazione dei treni insieme agli strumenti per la caratterizzazione delle funzioni e la loro verifica sia su scenari operativi nominali che degradati. Il progetto è co-finanziato dal programma ESA NAVISP-2 con il contributo finanziario dell’ASI.


